Analyzing Cognitive Abilities in Embodied Robotics Systems
Project Period: 2024-2027
Abstract
This thesis, “Analyzing Cognitive Abilities in Embodied Robotics Systems”, investigates the cognitive potential of embodied robotics, offering a novel perspective by interpreting robotic behaviour through the lens of human-like cognition. It addresses a key gap in current methodologies, which often assess isolated cognitive abilities without accounting for the inherently interconnected nature of cognition in intelligent systems.
Central to this research is the development of a domain-specific framework that systematically maps core cognitive qualities—perception, attention, memory, reasoning, and anticipation—to decision-making processes in AI models. By anchoring the study in embodied robotics, the thesis emphasizes how physical embodiment and environmental interaction shape and reflect cognitive-like behaviours.
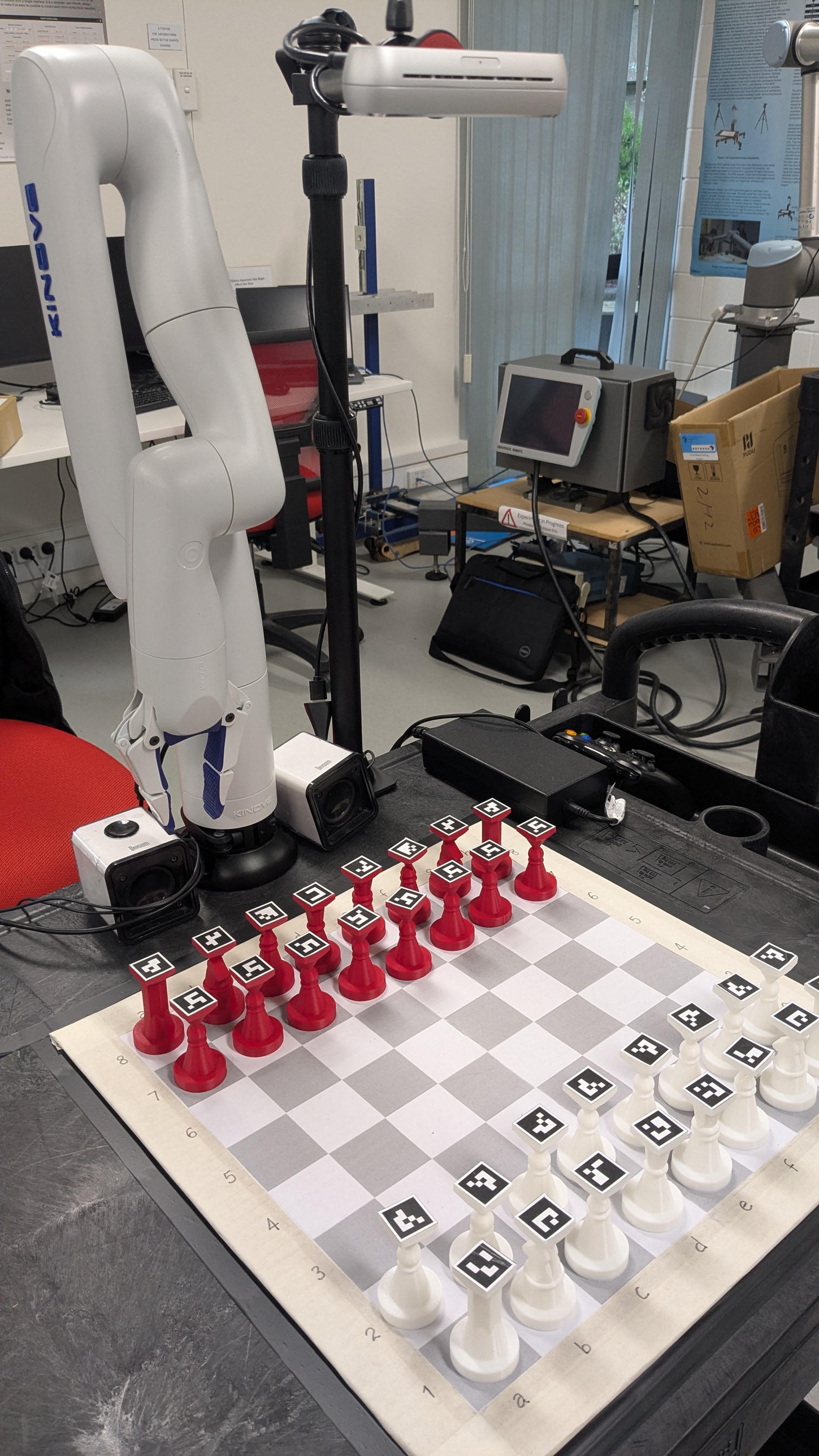
Using chess as a test domain, the study compares a rule-based chess-playing robot with transformer-based embodied robotic systems trained on a custom dataset. Explainable AI (XAI) techniques are applied to reveal how learned models exhibit cognitive-like capabilities, offering deeper insights into their internal reasoning processes.
To support practical evaluation, the research introduces a cognitive interpretation toolkit tailored for embodied robotics, to analyze the interplay of cognitive abilities. A mixed-methods approach, combining experimental validation and interpretive analysis, ensures a robust evaluation of the proposed framework.
This thesis contributes a multi-layered, cognition-centric architecture for embodied AI systems, aiming to advance cognitive interpretability in robotics. Hoping to frame embodied robotics application through the lens of cognition to lay a foundation for deeper understanding and more nuanced assessment of artificial cognitive behaviour in physically grounded systems.
Study Period: 2024-2027
Team Members: Damith Herath; Maleen Jayasuriya; Janie Busby Grant; Carlos Kuhn; Buddhi Gamage
Publication
Adnan, Muntasir; Gamage, Buddhi; Xu, Zhiwei; Herath, Damith; and Kuhn, Carlos, “Unleashing Artificial Cognition: Integrating Multiple AI Systems” (2024). ACIS 2024 Proceedings. 31. https://aisel.aisnet.org/acis2024/31

Damith Herath
Founder/Lead Collaborative Robotics Lab
Professor Damith Herath is the Founder and leader of the Collaborative Robotics Lab (CRL). His work focuses on exploring how robots and humans can collaborate, with an emphasis on the intersection of engineering, psychology, and the arts. His interdisciplinary approach actively seeks insights across diverse fields, promoting innovation and collaboration that transcends traditional disciplinary boundaries.

Maleen Jayasuriya
Staff
Maleen Jayasuriya is a Lecturer in Robotics at the University of Canberra’s Faculty of Science and Engineering with a research focus on human-robot interaction and explainable AI (XAI) in robotics. Maleen holds a Bachelor’s degree in Electrical and Electronic Engineering from Sri Lanka and a PhD from the University of Technology Sydney, where his research focused on robot perception, localisation, and deep learning. He later completed a postdoctoral fellowship at UTS, contributing to research on collaborative robotics for sustainable construction.

Janie Busby Grant
Psychology Research Lead
Associate Professor Janie Busby Grant is the Psychology Research Lead at CRL, where her work integrates human-robot interaction and artificial intelligence with a foundation in cognitive psychology and research design. With a strong emphasis on practical applications, Janie brings a reconciliatory approach to interdisciplinary research, particularly in exploring factors influencing human perception of, and engagement with robotic systems.

Carlos Kuhn
Staff
Carlos Kuhn is a distinguished physicist and researcher with a profound expertise in Generative AI and Cognitive AI. He holds a Bachelor’s in Physics, a Master’s in Physics, and a PhD in Theoretical Quantum Physics from the Universidade Federal do Rio Grande do Sul (UFRGS), Brazil. His doctoral research on the Exactly Solvable Model for Hetero-Triatomic Molecular Bose-Einstein Condensate highlighted his exceptional skills in complex mathematical modelling.